1 技术背景
高速加工中心第二轮开发试制已完成阶段性工作,在这里将从硬件配置、软件标准化编程、关键技术应用开发等几个方面着重描述系统配置、光栅尺全闭环应用、龙门式同步轴调整、和第三方主轴调整等关键技术,为我厂后期电气控制技术的提升提供参考和经验。
2 硬件配置要点
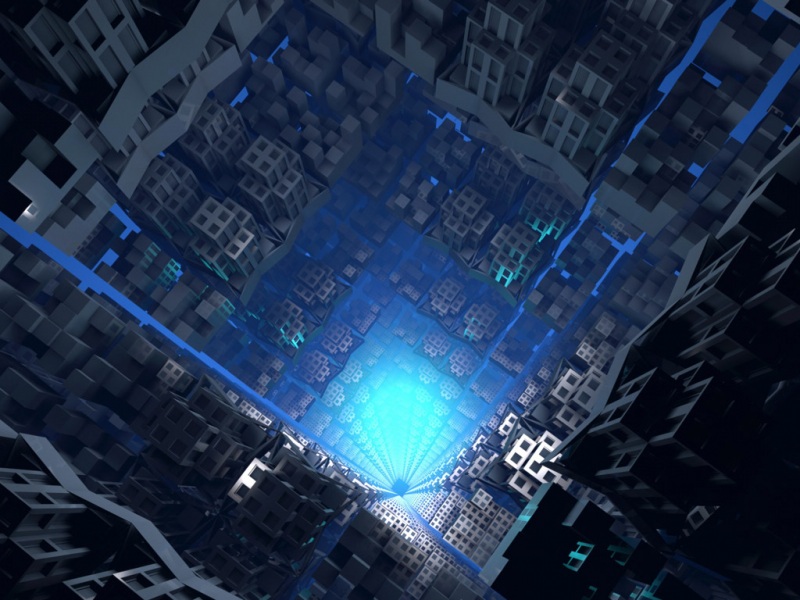
该高速加工中心的 840D 数控系统硬件配置如下图 1 所示:大体上可归结为一层网、两个总线。
图 1 高速加工中心 840D数控系统硬件配置
一层网是:MPI / OPI 网:它将 840D控制核心NCU、人机界面 HMI- PCU50、机床操作面板 MCP连接在一起,使操作者可通过 HMI 或 MCP 来访问控制器 NCU,实现系统参数、程序等数据的调整输入和输出、设备状态的可视化等功能。在该网设置中可有两种形式:MPI 或 OPI ,它们的区别在于传输速率不同:
MPI 的速率为 187.5Kbit/S,OPI 的速率为 1.5Mbit/s 一般情况下选择后者。在设置中应注意以下三点:
1、 MPI/OPI 的设置在 PLC 控制程序 (即:NCU中)、HMI 上、MCP 三者要保持一致,否则造成网络故障。
2、在 HMI 进行初始化后,MMC 的设置恢复到默认值,应进行检查和修改,保证网络地址不冲突,否则造成网络故障。
3、PI / OPI 低层通讯协议遵循 RS485 协议,在硬件上使用双绞线和 DP 接 头,为了在网络两端接入终端电阻,应从 DP 接头的进线端接入,否则造成网络不稳定或故障。
两个总线是:驱动总线和设备总线,驱动总线通过串联实现 NCU 与 611D 驱动器位控板之间的信号传递。设备总线是驱动电源模块向 NCU、611D 位控板提供工作电源(+15V)和监控功率部件温度。在该项目中,采用了设备总线双层安装方高速加工中心数控系统开发和应用式,主要是考虑到设备总线的连接能力,此外,在电机、功率部件确定的情况下,如何选择电源模块,是决定高速加工中心电气控制的关键,下面想就此做详细的分析。
(一)计算轴连续馈入功率:
通过下表可计算出各轴的输出额定功率
根据电源模块工作特性,输出额定功率在1.8~8.8KW 的轴为 B 轴和刀库 STK 这 2 个轴,B轴的进给系数为 0.38,刀库的进给系数为 1;输出额定功率在 8.8~27KW 的轴为 X1、X0、Y、Z 这 4个轴,它的进给系数为 0.38;则所计算出来的进给轴连续馈入功率:
P2 =(3.570.38 +4.8 * 1 +(10.5 +10.5 +14.7 +10.5)70.38)71.1=26.05KW
而 主 轴 的 连 续 馈 入 功 率 :P3 =1.25734 =42.5KW则总系统连续馈入功率 P4=P2+P3=68.55KW
(二)计算轴峰值馈入功率
通过下表可计算出各轴的峰值功率
总系统连续馈入功率 P6=P5+P3=126KW
分析:通过以上计算,可以看出:电源模块的选择应满足:
连续馈入功率> 68.55KW (P4)
峰值馈入功率> 126KW (P6)
结果:选择了电源模块的连续馈入功率为80KW,峰值馈入功率为 131KW,满足以上使用要求。
(三)检查允许的电子和功率供电能力
虽然通过以上计算,所选择的电源在强电回路满足使用要求,但还需进行其电子回路和功率部件回路供电能力的检查,如果能力不够,必须采取措施,保证系统可靠地运行。下面是电源供电能力的计算:
系统规定:T-EP 必须小于 8,T- AP 必须小于17,而以上计算结果均不满足这一条件,在该系统设计时,采用一块监控模块,来分担系统对电子回路和功率部件回路电源管理的压力。具体做法是电源模块在电子线路上只带主轴和 Y 轴,其余的轴由监控模块供电。如下表计算:
由电源模块带的轴配置计算:
由监控模块带的轴配置计算:
通过以上措施,完全满足系统要求,保证了系统可靠、稳定地运行。
需要说明的是:在 Y 轴电机和驱动的选型上,对其扭矩提升了一档,电机最大扭矩为70NM,驱动输出最大电流为 112A,较好地解决了以往 Y轴响应低的问题。
3 软件标准化设计:
软件设计主要是指 840D数控系统的 PLC 程序设计,在该项目中,对其中关键程序进行了标准化设计,主要是将主轴和进给轴分别编写相应的标准功能块 FC,对西门子提供的手轮功能块做适应性的修改和扩展,为该系统软件标准化设计作出努力。主要的做法是:围绕轴使能、轴禁止、进给倍率、位置环激活等内容,用形参(符号)进行编程,组织其正确的逻辑关系和时序,当对轴编程时,只需调用此功能块,并对相应的形参赋值,以下为标准功能块的一部分:
FC100:
L #NUM_AXE
+ 30
T #NUMDB
OPN DB [#NUMDB]
A M 0.1
= DBX 1.7 // 倍率激活
A #B65
= DBX 2.1 // 控制器使能
A #B663
= DBX 21.7 // 脉冲使能
A #FC_REF
= DBX 12.7 // 回零减速开关
A #FCHARD_P
= DBX 12.1 // 正向硬超程开关
A #FCHARD_M
= DBX 12.0 // 负向硬超程开关
以 上 #B65、#B663、#FC_REF、#FCHARD_P、#FCHARD_M均为符号,对它们进行相应的赋值,就可对各个轴进行控制,大大简化了控制程序,该程序运行良好。
此外,对移动手轮的控制程序进行优化和扩展,它可应用于所有该类型的手轮,对其它数控系统的应用也有借鉴意义,即移动手轮的控制程序已实现了标准化。
4 现场调试中关键技术的开发与应用
(一)全闭环位置环设置和补偿
在该项目中 X1、X0、Y、Z 轴配置了距离编码光栅尺,B 轴配置了角度编码器,即参与插补的四个轴实现了全闭环控制,通过摸索,形成一套简单而又行之有效的控制方法:
1、全闭环位置控制电气设置
全闭环位置环设置与半闭环相似,主要是对轴参数进行设置,在设置时需注意的是指明所激活的位置环是第二位置环,并正确输入反馈类型及极性,设置完成后,不需要回零减速开关,可进行正向或负向回零,对于采用了距离编码的光栅尺,轴只需要移动相邻的两个零脉冲以上的距离,系统便会找到零点。这种回零方式简单、灵活、可靠。
2、全闭环位置环补偿
通过激光干涉仪的测量,发现各轴(光栅尺)有“缩水”现象,大约为 0.01mm,为了提高设备精度,有必要对全闭环位置环进行补偿。由于采用的数控系统不同,补偿方法也不同,以往我们只对FANUC、INDRAMART数控系统进行了补偿,对于西门子数控系统的补偿还是第一次。具体方法为:
1> 由于补偿参数的修改,可能造成 NC 系统内存的从新分配,所以在进行补偿前应进行系统参数、补偿数据、驱动参数等备份;
2> 修改参数 MD38000,设置补偿点,将参数MD32700=0,允许写入补偿值;
3> 将 NC 中相应轴的补偿文件 ARCHIVE 到硬盘中;
4> 将此文件拷贝到零件加工程序目录下;
5> 打开此文件,删除文件题头,将补偿数据逐个输入;
6> 设备重新回零,并运行该零件加工程序;
7> 将参数 MD32700=1,使补偿值有效;
8> 设备重新回零,补偿完成。
通过补偿,各轴的移动精度都有所提高,为:小于 0.01mm。
(二)龙门轴的控制方法和应用
为了提高 X 轴移动速度,X 轴由 X1、X0 两个伺服电机驱动,其中一个是主动轴,另一个是从动轴,它们有各自的位置环(光栅尺)反馈,为了使它们能进行龙门式的同步动作,关键是要解决回零的问题。龙门轴的回零与其它轴的回零有所不同,通过摸索,主要有以下几个过程,在此进行总结:
1、主动轴回零:回零过程与非龙门轴一致,即:对主动轴发出回零命令,主动轴就按设置好的回零方式进行回零,同时从动轴与主动轴同步运动;
2、一旦主动轴回零完成,从动轴自动开始回零,同时,主动轴与从轴同步运动;
3、当主 / 从轴均完成回零后,它们需要进行同步,如果此时主/从零点之间的距离值小于参数MD37110 中的数据,则同步自动完成,否则需进行下一步;
4、将主 / 从之间的差值输入到主动轴的参数MD34090 中,使参数激活;
5、重新回零,主 / 从动轴重复上述 1~2 步,同步自动进行,则回零完成。
(三)第三方主轴的应用
在本项目中,采用的是瑞士 CYTEC公司的电主轴,其额定功率为 34KW,专为汽车工业中高效率节拍生产设计,适用于铣削、钻削和攻丝等加工。由于它是非西门子公司产品,则要保证电主轴的各项电气参数与西门子驱动和系统匹配,主要的电气参数是电主轴的额定电压、阻抗、频率以及温度传感器、编码器信号等,下表是电主轴的电气参数:
将以上电主轴参数和其它相关共 30 多个参数输入到系统驱动参数中,进行试运行,将主轴速度由低逐渐向高调整,观察驱动器输出的情况,调整主轴速度环增益,使驱动输出在一定范围内达到平稳,即可。
5 结束语
通过对高速加工中心的第二轮开发,更换了控制系统,在设计和调试中,解决了第一轮开发存在的 Y 轴响应低等诸多问题,掌握了西门子840D中关于驱动、电源选型、龙门轴控制、第三方主轴控制等高速加工中心特有的控制方法,为我厂在后续项目的设计和开发上提供了技术储备。
如果觉得《高速加工中心数控系统开发和应用》对你有帮助,请点赞、收藏,并留下你的观点哦!