该篇博
客内容已上传至Github
链接:/slandarer/low_poly_poisson
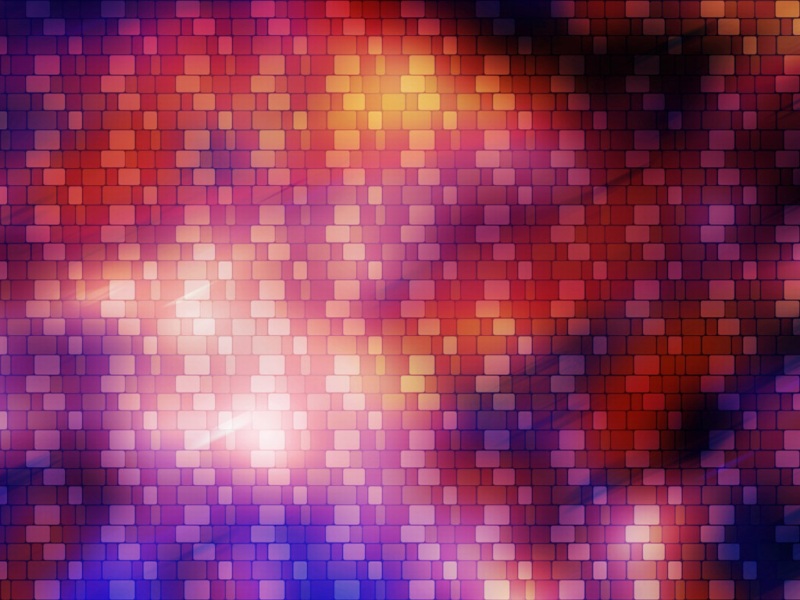
三角化效果:
步骤
1.图片灰度化后进行sobel卷积检测边缘
oriPic=imread('test.jpg');% use sobel algorithm to detect image edgesif size(oriPic,3)==3grayPic=rgb2gray(oriPic);elsegrayPic=oriPic;endsobelPic=sobelConv2_gray(grayPic);
sobel边缘检测函数:
使用矩阵运算加快运行速度
function sobelPic=sobelConv2_gray(oriPic)Hx=[-1 0 1;-2 0 2;-1 0 1];Hy=[1 2 1;0 0 0;-1 -2 -1];[rows,cols]=size(oriPic);exPic=uint8(zeros([rows+2,cols+2]));exPic(2:rows+1,2:cols+1)=oriPic;exPic(2:rows+1,1)=oriPic(:,1);exPic(2:rows+1,cols+2)=oriPic(:,cols);exPic(1,2:cols+1)=oriPic(1,:);exPic(rows+2,2:cols+1)=oriPic(rows,:);exPic(1,1)=oriPic(1,1);exPic(rows+2,1)=oriPic(rows,1);exPic(1,cols+2)=oriPic(1,cols);exPic(rows+2,cols+2)=oriPic(rows,cols);Gx=zeros([rows,cols]);Gy=Gx;for ii=1:3for jj=1:3tempPic=double(exPic(ii:rows+ii-1,jj:cols+jj-1));Gx=Gx+tempPic.*Hx(ii,jj);Gy=Gy+tempPic.*Hy(ii,jj);endendsobelPic=uint8(sqrt(Gx.^2+Gy.^2));end
原图:
卷积结果:
2.泊松圆盘采样
该算法的详解可以看看这一篇:
.za//05/03/poisson-disk-sampling/
使用泊松圆盘取样可以产生更加均匀的随机点:
左:随机取点
中:先构建网格,在网格交错点附近添加扰动
右:泊松圆盘取样
我们对泊松圆盘采样算法进行两次改写,分别应用于边缘处,及其他部分的采点,改写分别为:
边缘采点所采集点位置只能是sobel边缘检测较亮位置其他部分采点密度不同时两点之间最小距离会随之改变,且其他部分采点以边缘点为初始集
edgePic=sobelPic;edgePic(edgePic<max(max(edgePic)).*0.4)=0;[edgeX,edgeY]=find(edgePic>0);edgePntList=[edgeY,edgeX];% set the triangle densityredge=min(size(sobelPic))/80;rmax=min(size(sobelPic))/20;rmin=min(size(sobelPic))/40;% use poisson disc sampling to select pointsedgePntList=poissonEdge(edgePntList,redge);pntList=poissonDisk(sobelPic,[rmin,rmax],30,edgePntList);
其中
redge :边缘上两个取样点最近距离
rmax :边缘外 亮度最低时两个采样点最近距离
rmin :边缘外 亮度最高时两个采样点最近距离
当希望使边缘更加细致时,可以将redge后面的除数变大以获得更加密集的采样,例如:
redge=min(size(sobelPic))/120;
边缘采样函数
function resultSet=poissonEdge(edgeList,R)preSet=edgeList;resultSet=[0 0];resultSet(1,:)=[];times=0;while times<150tempPos=randi([1,size(preSet,1)],1);selectedPnt=preSet(tempPos,:);dis=sqrt(sum((edgeList-selectedPnt).^2,2));candidate=find(dis>=R&dis<=2*R);if length(candidate)>30pntSet=edgeList(candidate(1:30),:);elsepntSet=edgeList(candidate,:);endflag=0;for j=1:size(pntSet,1)pnt=pntSet(j,:);if size(resultSet,1)==0resultSet=[resultSet;pnt];preSet=[preSet;pnt];flag=1;elsedis=sqrt(sum((resultSet-pnt).^2,2));if all(dis>=R)resultSet=[resultSet;pnt];preSet=[preSet;pnt];flag=1;endendendif flag==1preSet(tempPos,:)=[];times=0;elsetimes=times+1;end disp(['edge pnt num:',num2str(size(resultSet,1))]);endend
其他区域采样函数
function resultSet=poissonDisk(grayPic,R,K,edgePntList)[m,n]=size(grayPic);preSet=edgePntList;resultSet=[edgePntList;1,1;n,m;1,m;n,1];grayPic=double(255-grayPic);cmin=min(min(grayPic));cmax=max(max(grayPic));rMap=grayPic-cmin;rMap=rMap./(cmax-cmin).*(R(2)-R(1))+R(1);times=0;while times<500tempPos=randi([1,size(preSet,1)],1);selectedPnt=preSet(tempPos,:);r=rMap(round(selectedPnt(2)),round(selectedPnt(1)));theta=rand(K,1).*2*pi;radius=rand(K,1).*r+r;x=radius.*cos(theta)+selectedPnt(1);y=radius.*sin(theta)+selectedPnt(2);flag=0;for j=1:Kpnt=[x(j),y(j)];if pnt(1)>=1&&pnt(2)>=1&&pnt(1)<=n&&pnt(2)<=mif size(resultSet,1)==0resultSet=[resultSet;pnt];preSet=[preSet;pnt];flag=1;elsedis=sqrt(sum((resultSet-pnt).^2,2));if all(dis>=r)resultSet=[resultSet;pnt];preSet=[preSet;pnt];flag=1; endend endendif flag==1preSet(tempPos,:)=[];times=0;elsetimes=times+1;enddisp(['pnt num:',num2str(size(resultSet,1))]);end end
边缘采样效果:
其他区域采样效果:
3.Delaunay三角剖分
% construct the delaunay triangleDT=delaunay(pntList(:,1),pntList(:,2));
4.重心法取色
我们要为每个三角形设置一个颜色,最简单的方法是取每个三角形重心处的颜色,即((x1,y1)+(x2,y2)+(x3,y3))/3处的颜色:
% calculate the pixel value at the center of gravity of the trianglevset1=pntList(DT(:,1),:);vset2=pntList(DT(:,2),:);vset3=pntList(DT(:,3),:);barycenter=round((vset1+vset2+vset3)./3);tempList=barycenter(:,2)+(barycenter(:,1)-1)*size(oriPic,1);if size(oriPic,3)==3 Rchannel=oriPic(:,:,1);Gchannel=oriPic(:,:,2);Bchannel=oriPic(:,:,3);colorList(:,:,1)=Rchannel(tempList);colorList(:,:,2)=Gchannel(tempList);colorList(:,:,3)=Bchannel(tempList);elsecolorList(:,:,1)=oriPic(tempList);colorList(:,:,2)=oriPic(tempList);colorList(:,:,3)=oriPic(tempList);end
5.图片展示
% show picturez=zeros([size(pntList,1),1]);trisurf(DT,pntList(:,1),pntList(:,2),z,'CData',colorList,'EdgeColor','none')ax=gca;hold(ax,'on')set(ax,'XTick',[],'YTick',[],'XColor','none','YColor','none')axis equalset(ax,'YDir','reverse','View',[0,90])
6.完整代码
function lowPoly()oriPic=imread('test.jpg');% use sobel algorithm to detect image edgesif size(oriPic,3)==3grayPic=rgb2gray(oriPic);elsegrayPic=oriPic;endsobelPic=sobelConv2_gray(grayPic);edgePic=sobelPic;edgePic(edgePic<max(max(edgePic)).*0.4)=0;[edgeX,edgeY]=find(edgePic>0);edgePntList=[edgeY,edgeX];% set the triangle densityredge=min(size(sobelPic))/80;rmax=min(size(sobelPic))/20;rmin=min(size(sobelPic))/40;% use poisson disc sampling to select pointsedgePntList=poissonEdge(edgePntList,redge);pntList=poissonDisk(sobelPic,[rmin,rmax],30,edgePntList);% imshow(sobelPic)% hold on% scatter(pntList(:,1),pntList(:,2),3,'filled')% construct the delone triangleDT=delaunay(pntList(:,1),pntList(:,2));%triplot(DT,pntList(:,1),pntList(:,2));% calculate the pixel value at the center of gravity of the trianglevset1=pntList(DT(:,1),:);vset2=pntList(DT(:,2),:);vset3=pntList(DT(:,3),:);barycenter=round((vset1+vset2+vset3)./3);tempList=barycenter(:,2)+(barycenter(:,1)-1)*size(oriPic,1);if size(oriPic,3)==3 Rchannel=oriPic(:,:,1);Gchannel=oriPic(:,:,2);Bchannel=oriPic(:,:,3);colorList(:,:,1)=Rchannel(tempList);colorList(:,:,2)=Gchannel(tempList);colorList(:,:,3)=Bchannel(tempList);elsecolorList(:,:,1)=oriPic(tempList);colorList(:,:,2)=oriPic(tempList);colorList(:,:,3)=oriPic(tempList);end% show picturez=zeros([size(pntList,1),1]);trisurf(DT,pntList(:,1),pntList(:,2),z,'CData',colorList,'EdgeColor','none')ax=gca;hold(ax,'on')set(ax,'XTick',[],'YTick',[],'XColor','none','YColor','none')axis equalset(ax,'YDir','reverse','View',[0,90])%% Correlation Functions============================================function resultSet=poissonEdge(edgeList,R)preSet=edgeList;resultSet=[0 0];resultSet(1,:)=[];times=0;while times<150tempPos=randi([1,size(preSet,1)],1);selectedPnt=preSet(tempPos,:);dis=sqrt(sum((edgeList-selectedPnt).^2,2));candidate=find(dis>=R&dis<=2*R);if length(candidate)>30pntSet=edgeList(candidate(1:30),:);elsepntSet=edgeList(candidate,:);endflag=0;for j=1:size(pntSet,1)pnt=pntSet(j,:);if size(resultSet,1)==0resultSet=[resultSet;pnt];preSet=[preSet;pnt];flag=1;elsedis=sqrt(sum((resultSet-pnt).^2,2));if all(dis>=R)resultSet=[resultSet;pnt];preSet=[preSet;pnt];flag=1;endendendif flag==1preSet(tempPos,:)=[];times=0;elsetimes=times+1;end disp(['edge pnt num:',num2str(size(resultSet,1))]);endendfunction resultSet=poissonDisk(grayPic,R,K,edgePntList)[m,n]=size(grayPic);preSet=edgePntList;resultSet=[edgePntList;1,1;n,m;1,m;n,1];grayPic=double(255-grayPic);cmin=min(min(grayPic));cmax=max(max(grayPic));rMap=grayPic-cmin;rMap=rMap./(cmax-cmin).*(R(2)-R(1))+R(1);times=0;while times<500tempPos=randi([1,size(preSet,1)],1);selectedPnt=preSet(tempPos,:);r=rMap(round(selectedPnt(2)),round(selectedPnt(1)));theta=rand(K,1).*2*pi;radius=rand(K,1).*r+r;x=radius.*cos(theta)+selectedPnt(1);y=radius.*sin(theta)+selectedPnt(2);flag=0;for j=1:Kpnt=[x(j),y(j)];if pnt(1)>=1&&pnt(2)>=1&&pnt(1)<=n&&pnt(2)<=mif size(resultSet,1)==0resultSet=[resultSet;pnt];preSet=[preSet;pnt];flag=1;elsedis=sqrt(sum((resultSet-pnt).^2,2));if all(dis>=r)resultSet=[resultSet;pnt];preSet=[preSet;pnt];flag=1; endend endendif flag==1preSet(tempPos,:)=[];times=0;elsetimes=times+1;enddisp(['pnt num:',num2str(size(resultSet,1))]);end endfunction sobelPic=sobelConv2_gray(oriPic)Hx=[-1 0 1;-2 0 2;-1 0 1];Hy=[1 2 1;0 0 0;-1 -2 -1];[rows,cols]=size(oriPic);exPic=uint8(zeros([rows+2,cols+2]));exPic(2:rows+1,2:cols+1)=oriPic;exPic(2:rows+1,1)=oriPic(:,1);exPic(2:rows+1,cols+2)=oriPic(:,cols);exPic(1,2:cols+1)=oriPic(1,:);exPic(rows+2,2:cols+1)=oriPic(rows,:);exPic(1,1)=oriPic(1,1);exPic(rows+2,1)=oriPic(rows,1);exPic(1,cols+2)=oriPic(1,cols);exPic(rows+2,cols+2)=oriPic(rows,cols);Gx=zeros([rows,cols]);Gy=Gx;for ii=1:3for jj=1:3tempPic=double(exPic(ii:rows+ii-1,jj:cols+jj-1));Gx=Gx+tempPic.*Hx(ii,jj);Gy=Gy+tempPic.*Hy(ii,jj);endendsobelPic=uint8(sqrt(Gx.^2+Gy.^2));endend
7.成品展示
如果觉得《MATLAB 图片三角风格化(low poly)》对你有帮助,请点赞、收藏,并留下你的观点哦!